


On this put up, we introduce a reinforcement studying (RL) algorithm based mostly on the “different” paradigm. divide and conquer. Not like conventional strategies, this algorithm do not need Based mostly on time distinction (TD) studying ( Scalability challenges), which is adequate for long-term duties.
As a substitute of time distinction (TD) studying, you are able to do reinforcement studying (RL) based mostly on divide and conquer.
Drawback setting: Off-policy RL
Our downside setting is Off coverage RL. Let’s take a fast take a look at what this implies.
There are two lessons of algorithms in RL: on-policy RL and off-policy RL. On-policy RL means you’ll be able to solely Use new knowledge collected by your present coverage. Because of this previous knowledge have to be discarded each time you replace the coverage. Algorithms resembling PPO and GRPO (and coverage gradient strategies basically) belong to this class.
An off-policy RL implies that this restriction doesn’t exist. Any Varieties of knowledge resembling previous expertise, human demonstrations, and web knowledge. Due to this fact, off-policy RL is extra basic and versatile (and naturally harder!) than on-policy RL. Q-learning is essentially the most well-known off-policy RL algorithm. Domains the place knowledge assortment is pricey (for instance, roboticsdialogue techniques, healthcare, and so on.), you might be typically pressured to make use of out-of-policy RL. That is why that is such an vital difficulty.
I believe we’ve got a fairly good recipe for scaling up policy-based RL in 2025 (for instancePPO, GRPO, and their variants). Nonetheless, I have not discovered something that’s “scalable” but. Off coverage RL Algorithms that cope nicely with advanced and long-term duties. Let me briefly clarify why.
Two paradigms in worth studying: time distinction (TD) and Monte Carlo (MC)
Off-policy RL usually makes use of time-difference (TD) studying to coach the worth operate (In different phrasesQ-learning), utilizing the next Bellman replace rule:
[begin{aligned} Q(s, a) gets r + gamma max_{a’} Q(s’, a’), end{aligned}]
The issue is: Errors within the subsequent worth $Q(s’, a’)$ propagate by bootstrap to the present worth $Q(s, a)$ and trigger these errors. accumulate throughout the horizon. That is principally why TD studying has a tough time scaling as much as long-term duties (see this post If you’re inquisitive about particulars).
To alleviate this downside, a mix of TD studying and Monte Carlo (MC) returns is getting used. For instance, you’ll be able to carry out $n$-step TD coaching (TD-$n$).
[begin{aligned} Q(s_t, a_t) gets sum_{i=0}^{n-1} gamma^i r_{t+i} + gamma^n max_{a’} Q(s_{t+n}, a’). end{aligned}]
Right here we use the precise Monte Carlo returns (from the dataset) for the primary $n$ steps, after which use the bootstrap values for the remainder of the horizon. On this method, the variety of Bellman recursions will be decreased by $n$ instances, leading to much less error accumulation. Within the excessive case $n = infty$, pure Monte Carlo worth studying is recovered.
Though it is a affordable answer (in lots of instances it will work fine), very dissatisfied. First, it is not essentially Remedy the issue of error accumulation. The variety of Bellman recursions is decreased by a continuing issue ($n$). Second, as $n$ will increase, excessive variance and suboptimality happen. Due to this fact, $n$ can’t merely be set to a big worth and have to be rigorously tuned for every activity.
Is there a essentially totally different approach to remedy this downside?
The “Third” Paradigm: Divide and Conquer
My argument is that third worth studying paradigm, divide and conquercould present a perfect answer to off-policy RL that may be prolonged to arbitrary long-term duties.
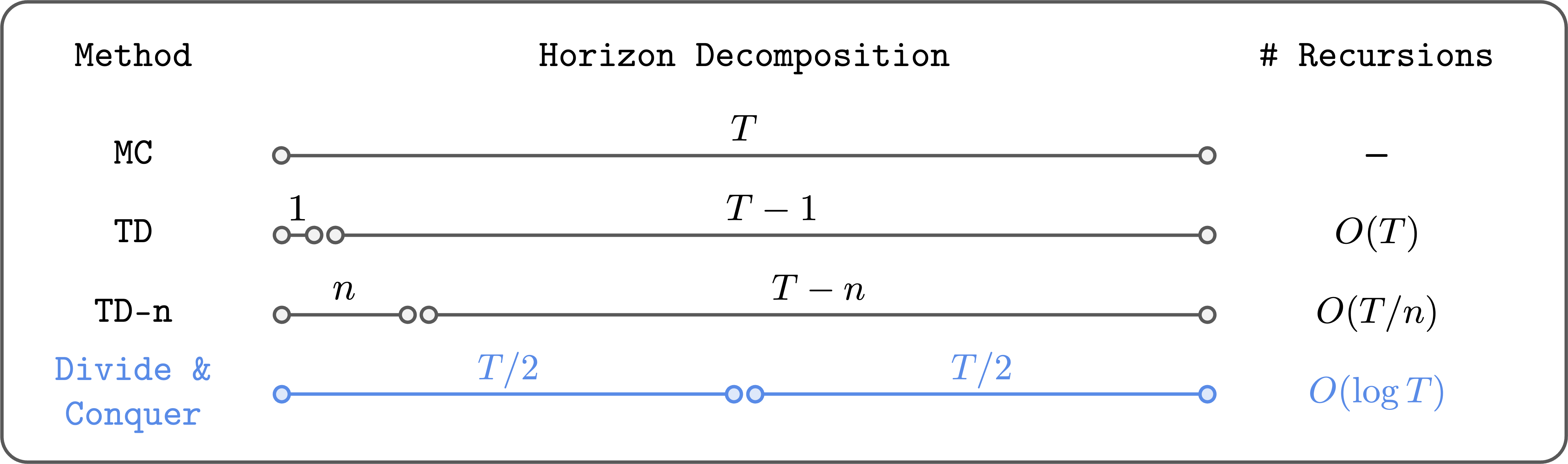
Divide and conquer reduces the variety of Bellman recursions logarithmically.
The important thing concept of divide and conquer is to divide the trajectory into two equal size segments and mix their values to replace the worth of the complete trajectory. On this method, you’ll be able to (theoretically) cut back the variety of Bellman recursions. logarithmically (Not linear!). Moreover, in contrast to $n$-step TD studying, there isn’t any want to decide on $n$-like hyperparameters and it’s not essentially topic to excessive variance or suboptimal results.
Conceptually, divide and conquer has all the nice traits wanted for worth studying. So I have been enthusiastic about this superior concept for a very long time. The issue is that till just lately it wasn’t clear easy methods to truly do that.
Sensible algorithm
in recent work co-led with Adityawe’ve got made significant progress towards realizing and scaling this concept. Particularly, we have been in a position to scale up divide-and-conquer worth studying to very advanced duties in at the very least one vital class of RL issues (to my data, that is the primary time this has been accomplished!). Objective conditional relative studying. Objective-conditional RL goals to be taught insurance policies that may attain any state from every other state. This creates a pure divide-and-conquer construction. Let me clarify this.
The construction is as follows. First, assume that the dynamics are deterministic, and signify the shortest path distance (the “time distance”) between two states $s$ and $g$ as $d^*(s, g)$. Then, the next triangle inequality is happy.
[begin{aligned} d^*(s, g) leq d^*(s, w) + d^*(w, g) end{aligned}]
For all $s, g, w in mathcal{S}$.
From a price perspective, this trigonometric inequality will be equivalently reworked as: “transitive” Bellman replace guidelines:
[begin{aligned}
V(s, g) gets begin{cases}
gamma^0 & text{if } s = g, \
gamma^1 & text{if } (s, g) in mathcal{E}, \
max_{w in mathcal{S}} V(s, w)V(w, g) & text{otherwise}
end{cases}
end{aligned}]
the place $mathcal{E}$ is the set of edges within the transition graph of the setting and $V$ is the worth operate related to the sparse reward $r(s, g) = 1(s = g)$. intuitivelyBecause of this if $w$ is the optimum “waypoint” (subgoal) on the shortest path, then we are able to use two “smaller” values $V(s, w)$ and $V(w, g)$ to replace the worth of $V(s, g)$. That is precisely the divide and conquer worth replace rule we have been in search of.
downside
Nonetheless, there’s one downside right here. The issue is that it’s unclear easy methods to truly select the optimum subgoal $w$. In a tabular setting, we are able to merely enumerate all states to seek out the optimum $w$ (that is primarily the Floyd-Warshall shortest path algorithm). However in a steady setting with a big state area, this isn’t attainable. Basically, for this reason earlier analysis has struggled to scale up divide-and-conquer worth studying, although the thought has been round for many years (the truth is, the thought dates again to the primary research of goal-conditional RL). Cale Bring (1993) – look our paper Associated works will likely be mentioned in additional element). The principle contribution of our research is a sensible answer to this downside.
answer
Our key concepts are: restrict The search area of $w$ for states that seem within the dataset, particularly states that lie between $s$ and $g$ within the trajectory of the dataset. Additionally, as an alternative of trying to find the optimum $textual content{argmax}_w$, compute a “delicate” $textual content{argmax}$ utilizing: expected regression. That’s, to attenuate the lack of:
[begin{aligned} mathbb{E}left[ell^2_kappa (V(s_i, s_j) – bar{V}(s_i, s_k) bar{V}(s_k, s_j))right],finish{align}]
Right here $bar{V}$ is the goal worth community, $ell^2_kappa$ is the anticipated worth loss as a result of anticipated worth $kappa$, and the anticipated worth is carried over to all $(s_i, s_k, s_j)$ tuples with $i leq okay leq j$ within the trajectory of the randomly sampled dataset.
This has two advantages. First, there isn’t any want to go looking the complete state area. Second, we stop the $max$ operator from overestimating the values through the use of a “softer” expectation regression as an alternative. That is known as an algorithm Transitive RL (TRL). try our paper For extra info and additional dialogue, please see right here.
Will it work?
humanoid maze
puzzle
To see if our methodology can cope nicely with advanced duties, we immediately evaluated TRL on among the most tough duties. OG bench,Benchmarking offline goal-conditional RL. We primarily used essentially the most tough model of the humanoid maze and puzzle activity with a big 1B dimension dataset. These duties are extraordinarily tough and require performing a most of advanced abilities together. 3,000 environmental steps.
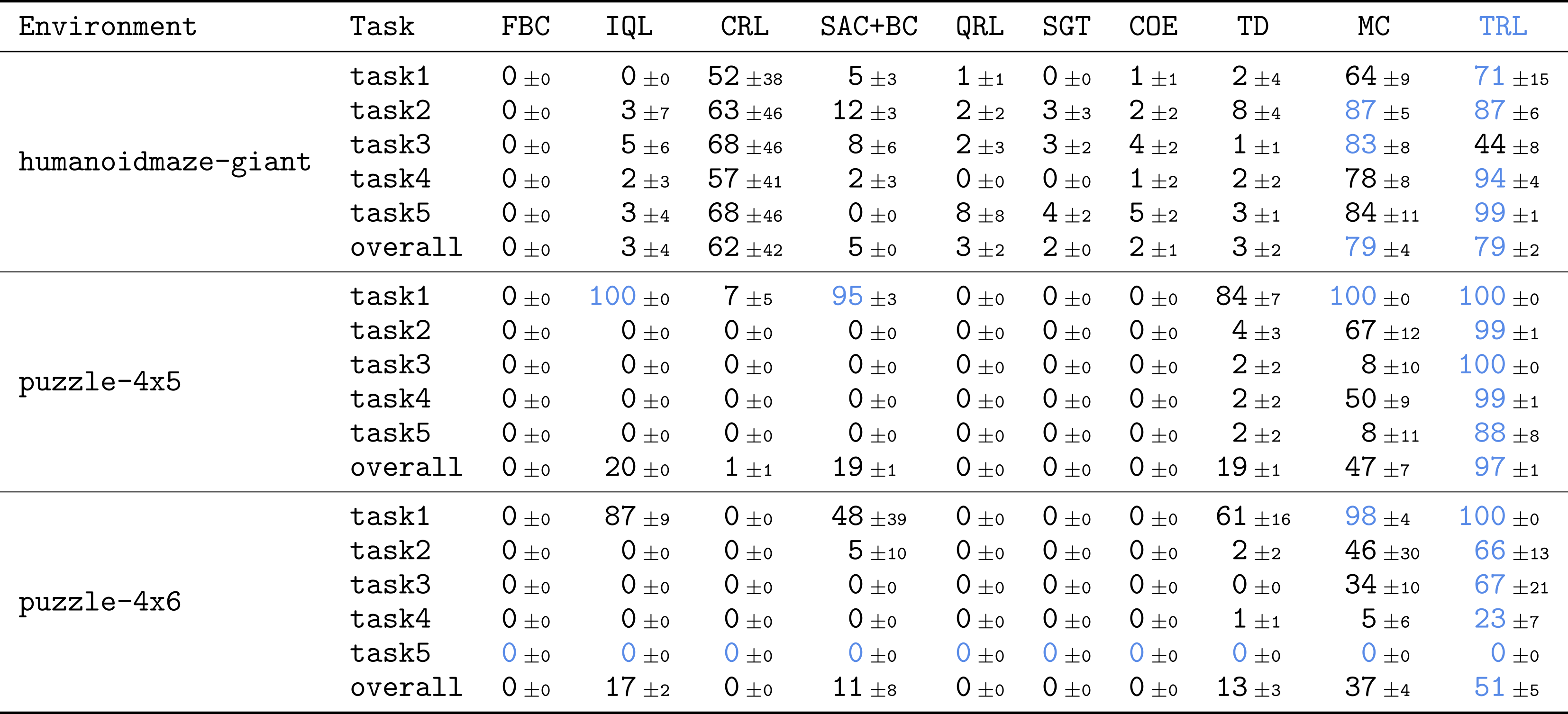
TRL gives the most effective efficiency for essentially the most tough and long-duration duties.
The outcomes are very thrilling. In comparison with many sturdy baselines throughout totally different classes (TD, MC, quasi-metric studying, and so on.), TRL achieves the most effective efficiency on most duties.

TRL is finest fitted to individually tuned TD-$n$. No have to set $boldsymbol{n}$.
That is my favourite plot. We in contrast $n$ step TD studying and TRL utilizing totally different $n$ values, from $1$ (pure TD) to $infty$ (pure MC). The outcomes are actually nice. TRL matches the optimum TD-$n$ for all duties. No have to set $boldsymbol{n}$! That is precisely what we needed from the divide and conquer paradigm. By recursively splitting a trajectory into smaller trajectories, we are able to: Naturally Lengthy horizons will be dealt with with out arbitrarily selecting the size of the orbital chunks.
This paper accommodates plenty of extra experiments, analyses, and ablations. Please test it out if you’re . our paper!
What’s subsequent?
On this put up, we shared some promising outcomes from a brand new divide-and-conquer worth studying algorithm, Transitive RL. That is only the start of the journey. There are various unanswered questions and attention-grabbing instructions to discover.
-
Maybe an important query is easy methods to prolong TRL past goal-conditional RL to common reward-based RL duties. Does common RL have the same divide-and-conquer construction accessible to us? I am fairly optimistic about this, on condition that it’s attainable, at the very least in concept, to remodel reward-based RL duties into goal-conditional duties (see web page 40 of this e book) this book).
-
One other vital problem is coping with stochastic environments. Though present variations of TRL assume deterministic dynamics, many real-world environments are stochastic, primarily resulting from partial observability. For this function, “Stochastic” trigonometric inequality You would possibly get some hints.
-
In actual fact, I believe TRL nonetheless has a whole lot of room for enchancment. For instance, we are able to discover higher methods to pick out subgoal candidates (aside from candidates from the identical trajectory), additional cut back the hyperparameters, make the coaching extra steady, and additional simplify the algorithm.
Basically, I am very excited in regards to the prospects of the divide and conquer paradigm. I still Some of the vital points in RL (and even machine studying) is scalable Off-policy RL algorithm. I do not know what the ultimate answer will likely be, however perhaps it is divide and conquer; recursive Basic resolution making is without doubt one of the almost definitely candidates for this holy grail (by the way, I believe the opposite sturdy candidates are (1) model-based RL and (2) TD studying with some “magic” methods). Certainly, some latest analysis in different fields exhibits promise for recursive and divide-and-conquer methods. shortcut model, Log-linear cautionand recursive language model (After all, it’s also possible to use traditional algorithms like quicksort, phase bushes, FFT, and so on.) We stay up for seeing extra thrilling advances in scalable off-policy RL within the close to future.
Acknowledgment
I wish to thanks kevin and sergey Thanks in your useful suggestions on this put up.
This put up was first revealed Park Seo Hong’s blog.

{kind=link}