


A robotic looking for staff trapped in {a partially} collapsed mineshaft should rapidly map and find the location whereas navigating hazardous terrain.
Researchers have not too long ago begun constructing highly effective machine studying fashions to carry out this advanced job utilizing solely photographs from the robotic’s onboard digital camera, however even the most effective fashions can solely course of a couple of photographs at a time. In real-life catastrophe conditions, the place each second counts, search and rescue robots should rapidly traverse massive areas and course of hundreds of photographs to finish their missions.
To beat this drawback, researchers at MIT have developed a brand new system that may course of any variety of photographs, drawing concepts from each current synthetic intelligence imaginative and prescient fashions and classical pc imaginative and prescient. Their system precisely generates 3D maps of advanced scenes, akin to crowded workplace hallways, in seconds.
The AI-driven system incrementally creates and aligns small submaps of the scene and stitches them collectively to reconstruct an entire 3D map whereas estimating the robotic’s place in actual time.
Not like many different approaches, their method doesn’t require calibrated cameras or specialists to coordinate advanced system implementations. The easy nature of their method, mixed with the velocity and high quality of 3D reconstruction, makes it simple to scale up for real-world purposes.
Along with serving to search and rescue robots navigate, this methodology will also be used to create augmented actuality purposes for wearable gadgets akin to VR headsets, or to assist industrial robots rapidly discover and transfer items in warehouses.
“For robots to carry out more and more advanced duties, they want more and more advanced maps of the world round them. However on the similar time, we do not wish to make it troublesome to truly implement these maps. We confirmed that correct 3D reconstructions are potential in seconds with out-of-the-box instruments,” mentioned Dominic Maggio, MIT graduate pupil and lead creator of the paper. Papers on this method.
The paper contains postdoctoral fellow Hyungtae Lim and senior creator Luca Carlone, an affiliate professor within the MIT College of Aeronautics and Astronautics (AeroAstro), principal investigator within the Institute for Data and Resolution Programs (LIDS), and director of the MIT SPARK Institute. This analysis can be introduced on the Neural Data Processing Programs Convention.
plan an answer
For years, researchers have been engaged on a key component of robotic navigation known as simultaneous localization and mapping (SLAM). In SLAM, a robotic remaps its surroundings whereas adjusting its place in house.
Conventional optimization strategies for this job are inclined to fail in troublesome scenes and require pre-calibration of the robotic’s onboard digital camera. To keep away from these pitfalls, researchers prepare machine studying fashions to be taught this job from knowledge.
Though simple to implement, even the most effective fashions can solely course of about 60 digital camera photographs at a time, making them unusable for purposes the place robots want to maneuver rapidly by totally different environments whereas processing hundreds of photographs.
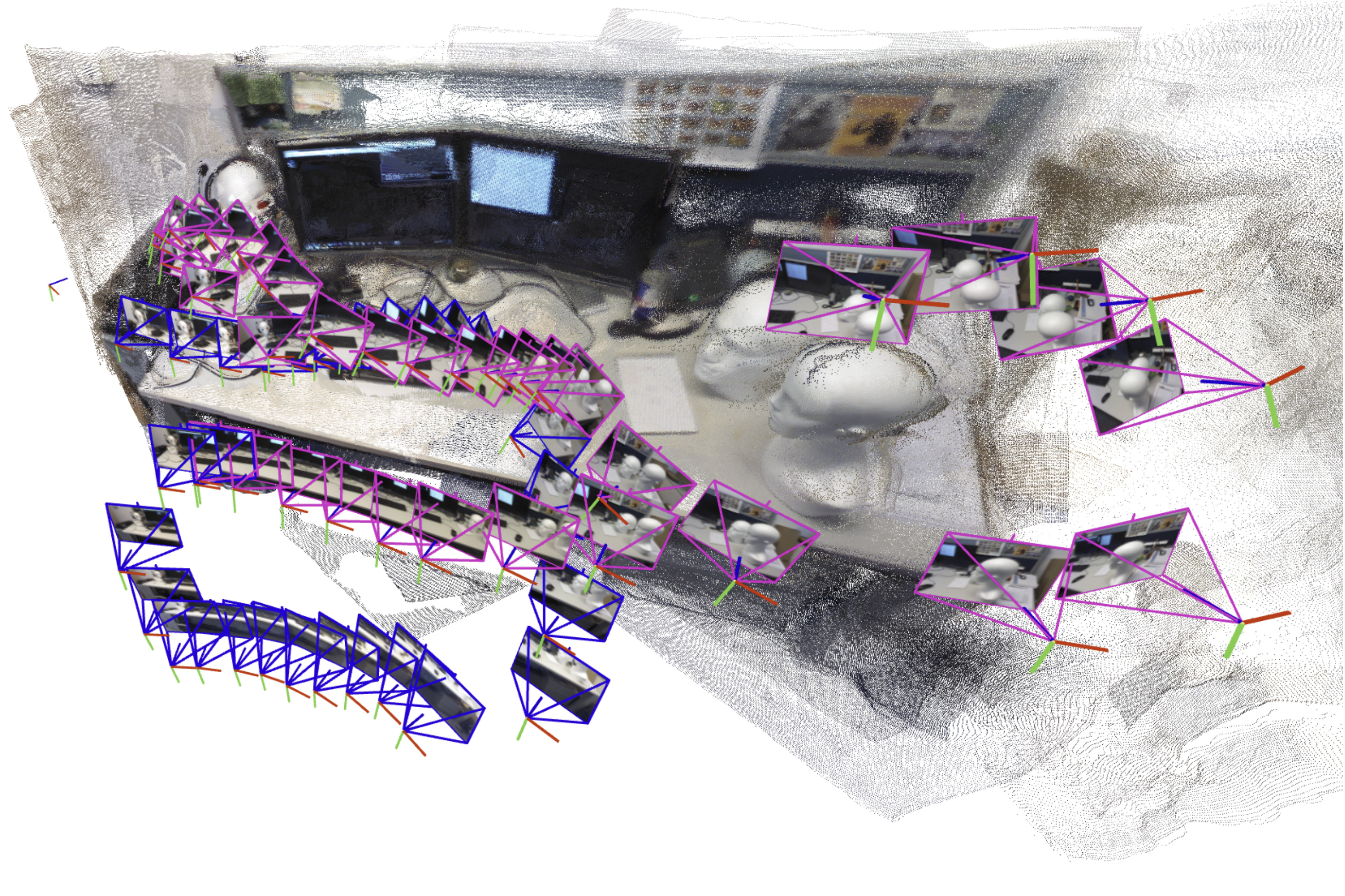
To resolve this drawback, researchers at MIT designed a system that generates smaller submaps of the scene quite than your complete map. Their methodology “glues” these submaps collectively into one general 3D reconstruction. Though the mannequin continues to be processing only some photographs at a time, the system can sew collectively smaller submaps to recreate bigger scenes quicker.
“This appeared like a quite simple answer, however after we first tried it, we have been stunned that it did not work that effectively,” Maggio says.
In the hunt for an evidence, he scoured pc imaginative and prescient analysis papers from the Eighties and Nineties. By means of this evaluation, Maggio realized that there was an error in the way in which the machine studying mannequin processed the photographs, making submap alignment a extra advanced drawback.
Conventional strategies align submaps by making use of rotations and translations till they line up. Nonetheless, these new fashions can introduce ambiguity into the submaps, making alignment troublesome. For instance, a 3D submap on one aspect of a room might have partitions which can be barely curved or stretched. Merely rotating and shifting these distorted submaps to align them is not going to work.
“We have to make it possible for all submaps are deformed in a constant approach in order that they align correctly with one another,” Carlone explains.
A extra versatile method
Borrowing concepts from classical pc imaginative and prescient, the researchers developed a extra versatile mathematical methodology that may signify all of the deformations inside these submaps. This extra versatile methodology permits you to align submaps in a approach that offers with ambiguity by making use of mathematical transformations to every submap.
Based mostly on the enter picture, the system outputs a 3D reconstruction of the scene and an estimate of the digital camera place. The robotic makes use of it to find itself in house.
“As soon as Dominic intuitively bridged the 2 worlds of learning-based approaches and conventional optimization strategies, it was very simple to implement,” says Carlone. “Arising with one thing so efficient and easy has the potential to have many purposes.
Their system didn’t require particular cameras or further instruments to course of the information, and it carried out quicker with fewer reconstruction errors than different strategies. The researchers generated near-real-time 3D reconstructions of advanced scenes, like the within of the MIT chapel, utilizing solely brief movies shot with cell telephones.
The common error of those 3D reconstructions was lower than 5 centimeters.
Sooner or later, the researchers hope to work on making their methodology extra dependable, particularly in advanced scenes, and implementing it on actual robots in troublesome environments.
“It is useful to find out about conventional geometry. The deeper you perceive what is going on on in your mannequin, the higher outcomes you get and the extra scalable issues change into,” Carlone says.
This analysis was supported partly by the U.S. Nationwide Science Basis, the U.S. Workplace of Naval Analysis, and the Korea Nationwide Analysis Basis. Carlone, who’s at the moment on depart as an Amazon Scholar, accomplished this analysis earlier than becoming a member of Amazon.

{kind=link}