


100 Reinforcement Studying (RL) – Deploying managed automobiles to hurry hour freeway site visitors to clean out congestion and scale back gas consumption for everybody. Our objective is to work “Stop and Go” waveoften there isn’t any clear trigger, but it surely causes irritating slowdowns and speed-ups that result in crowding and severe vitality waste. To coach environment friendly movement smoothing controllers, we construct high-speed, data-driven simulations wherein RL brokers work together, maximizing vitality effectivity whereas sustaining throughput and function safely round human drivers.
General, it’s adequate to enhance the small variety of well-controlled self-driving automobiles (AVS) to considerably enhance the site visitors quantity and gas effectivity of all drivers on the street. Moreover, the educated controller is designed to be deployed on most trendy automobiles, operates in a distributed method, and depends on commonplace radar sensors. With us Latest papers,We examine the problem of deploying RL controllers at massive scale, from simulations to discipline throughout the experiments of this 100 automobile.
Phantom Jam Challenges
Waves of stops transferring backwards previous freeway site visitors.
Driving, I positively skilled stop-and-go wave frustration. These waves are sometimes attributable to small variations in driving conduct amplified by the movement of site visitors. We naturally alter our pace primarily based on the car in entrance of us. If the hole opens, we pace as much as catch up. Making use of the brakes slows down. Nonetheless, resulting from non-zero response instances, the brakes could also be barely stiffer than the earlier car. The following driver behind us does the identical factor and this continues to amplify. Over time, what started as an insignificant slowdown modifications to a whole outage that stops additional into site visitors. These waves transfer the site visitors stream backwards, leading to a major drop in vitality effectivity resulting from frequent acceleration, and with elevated CO2 Emissions and accident dangers.
And this isn’t an remoted phenomenon! These waves are ubiquitous on busy roads when site visitors density exceeds the crucial threshold. So how are you going to tackle this problem? Conventional approaches reminiscent of ramp metering and variable pace limits try and handle site visitors flows, however typically require costly infrastructure and centralized coordination. A extra scalable method is to make use of AVS. AVS lets you dynamically alter your driving conduct in actual time. Nonetheless, merely inserting an AVS right into a human driver isn’t sufficient. You additionally must drive in a better method to enhance site visitors for everybody who seems in RL.
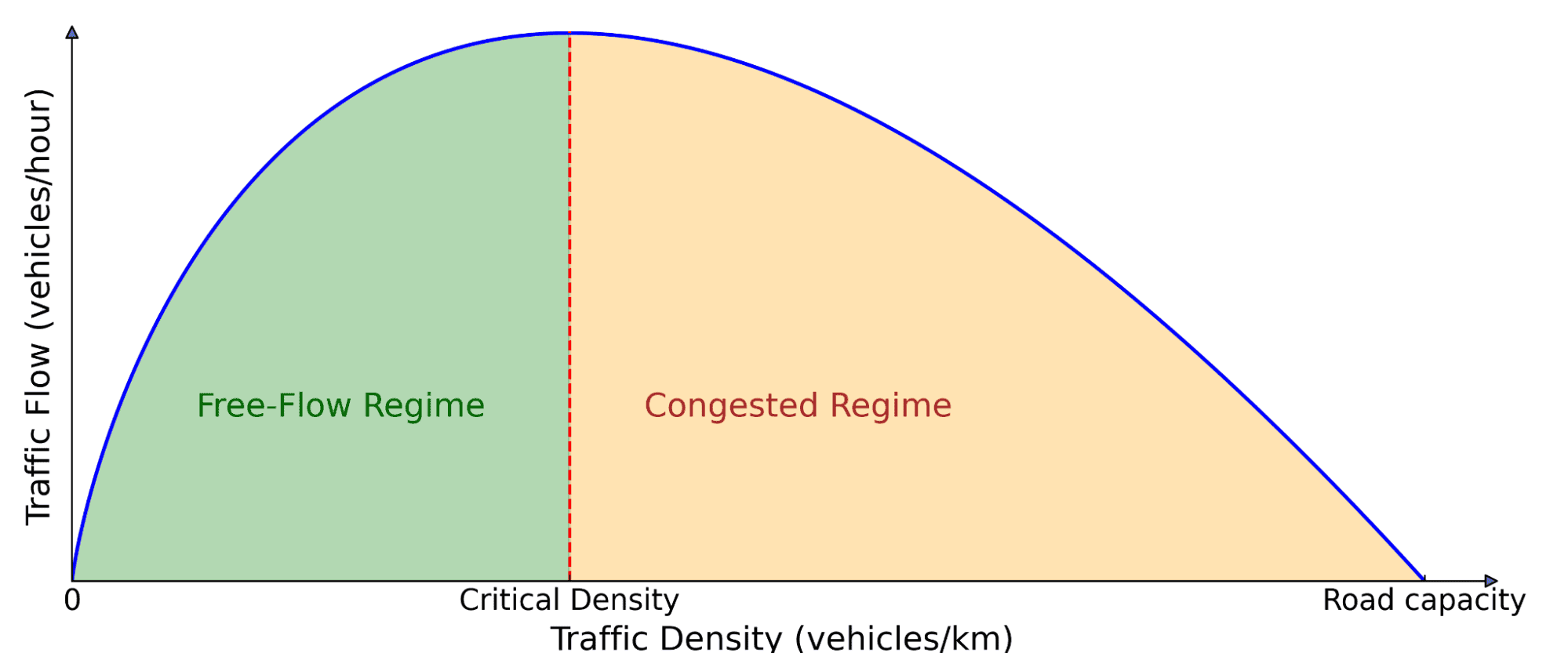
Primary diagram of site visitors movement. The quantity (density) of automobiles on the street impacts the quantity of site visitors transferring ahead (movement). At decrease density, extra automobiles can cross by, so including extra automobiles will improve the movement. However past the crucial threshold, automobiles begin blocking one another, resulting in crowding, and including extra automobiles truly slows down the general motion.
Reinforcement studying for clean wave AV
RL is a strong management method that permits brokers to study to maximise reward alerts by interplay with the atmosphere. Brokers collect experiences by trial and error, study from errors, and enhance over time. In our case, the atmosphere is a blended spontaneous site visitors state of affairs, and AVS learns driving methods to weaken the cease waves and scale back gas consumption for each itself and close by human-driven automobiles.
Coaching these RL brokers requires high-speed simulations with lifelike site visitors dynamics that may replicate the conduct of freeway stops. To attain this, we leverage experimental knowledge collected on Interstate 24 (I-24) close to Nashville, Tennessee, and use it to construct simulations the place automobiles regenerate freeway trajectories and create unstable site visitors that may assist AVS study to clean out.
Simulation performs freeway trajectories displaying a number of stops.
I designed the AVS with deployment in thoughts, permitting it to work utilizing solely fundamental sensor details about myself and the earlier car. Observations include the pace of the AV, the pace of the car forward, and the area hole between them. With these inputs in thoughts, the RL agent specifies both the instantaneous acceleration of AV or the specified pace. An necessary good thing about utilizing solely these native measurements is that RL controllers will be deployed in a distributed method to most trendy automobiles with out the necessity for added infrastructure.
Reward design
Essentially the most tough half is designing reward options that, as soon as maximized, match the varied targets that AVS needs to attain.
- Wave smoothing: Reduces cease and go vibration.
- Power Effectivity: Not simply AVS, however all automobiles additionally eat much less gas.
- Security: Ensure you have an affordable distance and keep away from sudden brakes.
- Driving consolation: Keep away from aggressive acceleration and deceleration.
- Compliance with human driving codes: Ensures “regular” driving conduct that doesn’t make surrounding drivers uncomfortable.
It’s tough to stability these targets. As a result of you’ll want to discover the suitable coefficients for every time period. For instance, if minimizing gas consumption controls rewards, RL AVS learns to cease in the course of the freeway, as vitality is perfect. To stop this, we now have launched dynamic minimal and most hole thresholds to make sure protected and cheap operation whereas optimizing gas effectivity. It additionally punished the gas consumption of human-driven automobiles behind AVs and discouraged them from studying egocentric behaviour that optimizes AV vitality financial savings on the expense of surrounding site visitors. General, we intention to stability vitality financial savings with having cheap and protected driving behaviors.
Simulation outcomes
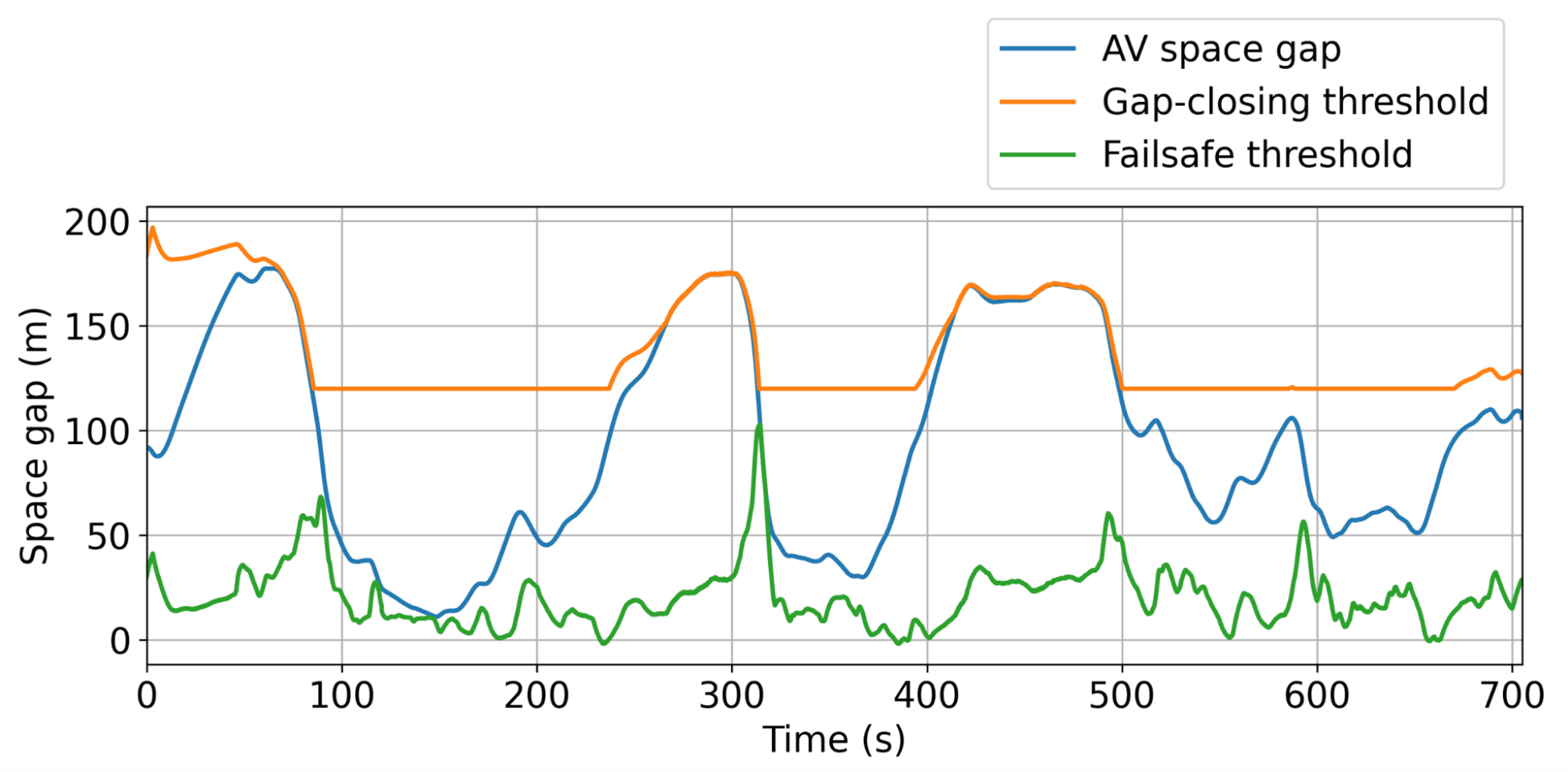
Determine 14 is a diagram of dynamic minimal hole and most hole thresholds in order that AV can function freely and site visitors as effectively and easily as attainable.
The everyday conduct realized by AVS is to take care of a barely bigger hole than a human driver, permitting them to extra successfully take up future, maybe sudden site visitors slowdowns. Within the simulation, this method offered as much as 20% gas financial savings for all street customers within the busiest state of affairs, with lower than 5% of AVS on the street. And these AVs do not must be particular automobiles! They are often commonplace client automobiles outfitted with Sensible Adaptive Cruise Management (ACC). This was an enormous check.
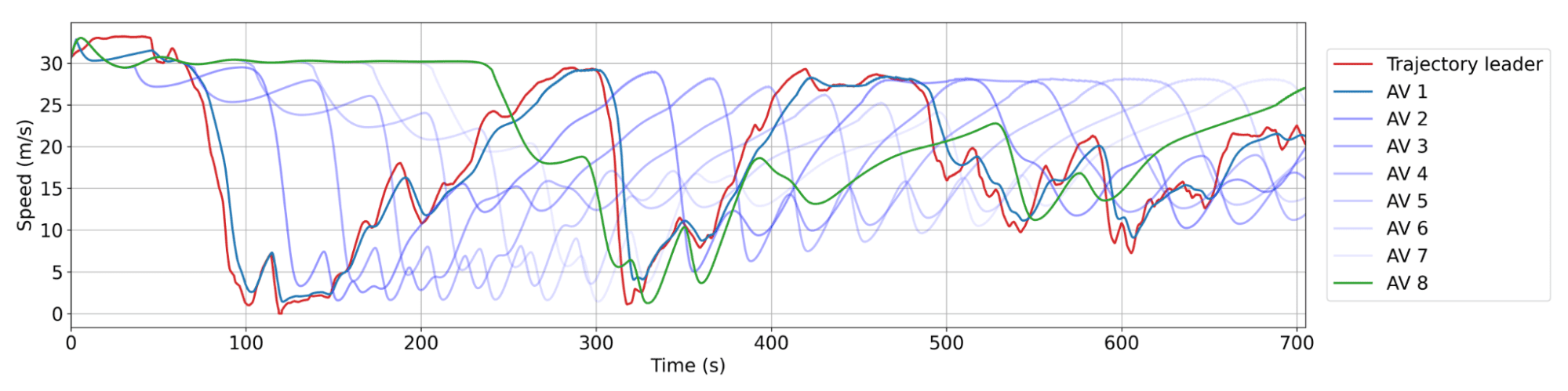
RL AVS smoothing operation. Purple: Human trajectories from the dataset. Blue: AVS of the platoon closest to the human trajectory AV 1. Often there are 20-25 human automobiles between the AVs. Every AV doesn’t sluggish or speed up as quick as a pacesetter, and the wave amplitude decreases over time, resulting in vitality financial savings.
100 AV Area Take a look at: Deploy RL at a Massive Scale


Our 100 automobiles parked within the operational centre throughout the week of the experiment.
Given the promising simulation outcomes, the pure subsequent step was to fill the hole from simulation to highways. We took a educated RL controller and deployed it to 100 automobiles on I-24 throughout peak site visitors hours for a number of days. This huge-scale experiment, referred to as the Megavandertest, is the biggest blended computerized site visitors smoothing experiment ever carried out.
Earlier than deploying the RL controllers into the sector, they had been extensively educated and evaluated in simulations and validated in {hardware}. General, the steps concerned within the deployment:
- Coaching in Information-Pushed Simulation: Utilizing I-24 freeway site visitors knowledge, we created a coaching atmosphere with lifelike wave dynamics, and examined the efficiency and robustness of educated brokers in a wide range of new site visitors eventualities.
- Deployment to {hardware}: After being verified with robotic software program, the educated controller is uploaded to the automobile and may management the car’s set pace. We function by onboard cruise management of the car. It acts as a low-level security controller.
- Modular Management Framework: One of many key challenges underneath testing was the lack to entry key car info sensors. To beat this, the RL controller is built-in into Megacontroller, a Megacontroller, which mixes a pace planner information explaining downstream site visitors situations, and the RL controller is the final word resolution maker.
- {Hardware} verification: RL brokers are designed to function in environments the place most automobiles are human-driven and require a strong coverage to adapt to unpredictable conduct. That is verified by driving RL-controlled automobiles on the street underneath cautious human supervision and altering the management primarily based on suggestions.
Every of them has 100 automobiles related to the Raspberry Pi, with RL controllers (small neural networks) deployed.

The RL controller instantly controls the onboard adaptive cruise management (ACC) system, units its pace and needs the space afterwards.
As soon as verified, the RL controller was deployed to 100 automobiles and was pushed on an I-24 throughout morning rush hour. Surrounding site visitors was unaware of the experiment and ensured unbiased driver conduct. Information was collected throughout experiments from dozens of overhead cameras positioned alongside the freeway, and trajectories of thousands and thousands of particular person automobiles had been extracted through laptop imaginative and prescient pipelines. The metrics calculated on these trajectories present a pattern within the discount in gas consumption round AVS, as anticipated from simulation outcomes and former small-scale verification developments. For instance, the nearer the individual behind the AVS drives, the much less gas on common consumes (that is calculated utilizing a calibrated vitality mannequin).
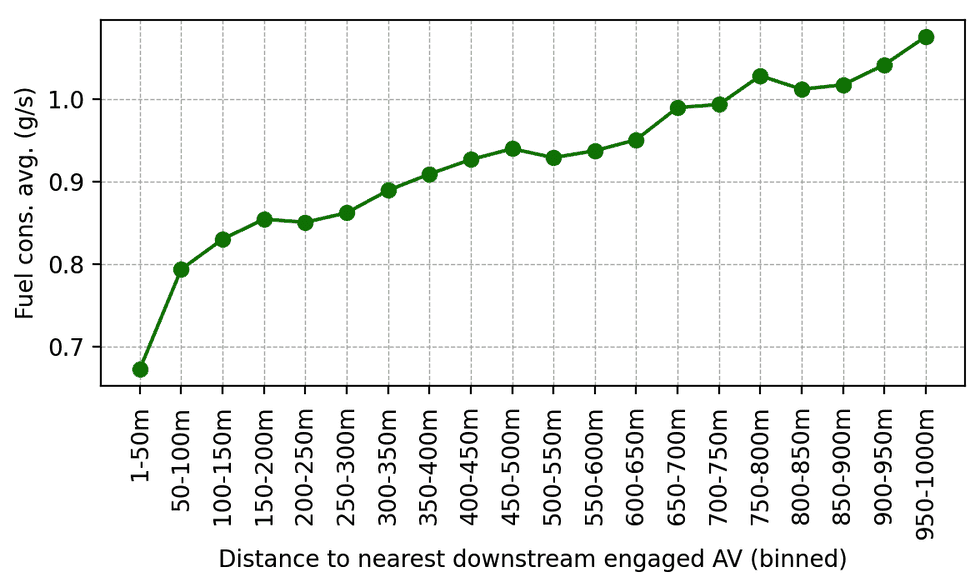
Common gas consumption as a perform of distance behind the closest concerned RL-controlled AV in downstream site visitors. As human drivers transfer additional behind the AVS, common gas consumption will increase.
One other solution to measure the influence is to measure the variance of velocity and acceleration. The decrease the dispersion, the much less amplitude the wave ought to have. That is what’s noticed from discipline check knowledge. General, getting correct measurements from a considerable amount of digital camera video knowledge is difficult, however a 15-20% pattern in vitality financial savings round a managed car is noticed.
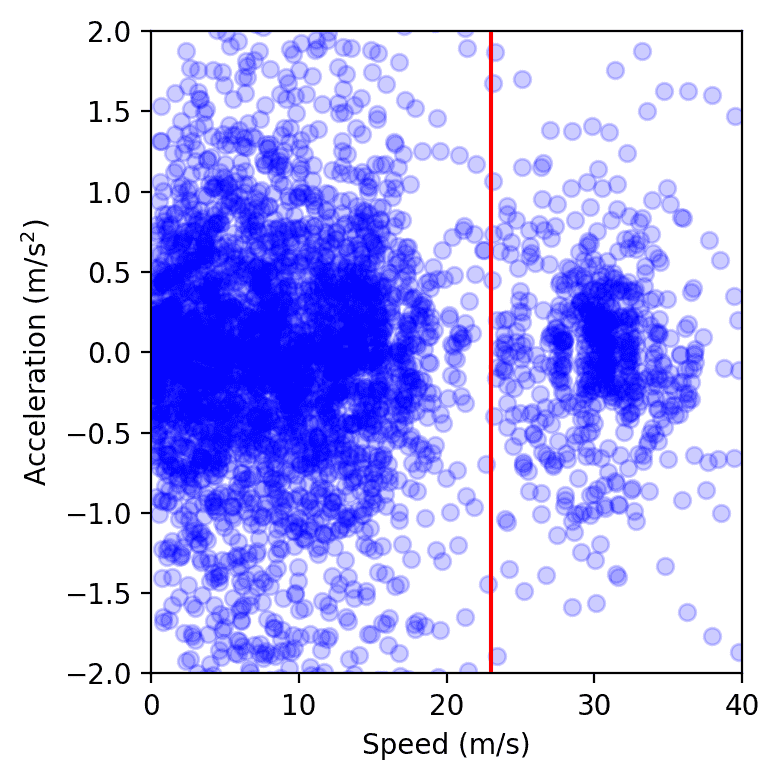
Information factors from all automobiles on the freeway are plotted within the velocity acceleration area over the day of the experiment. The cluster on the left of the crimson line represents congestion, whereas the cluster on the best corresponds to free movement. It may be seen that the congestion cluster shall be smaller when AVS is current, as measured by calculating the world of the smooth convex envelope or putting in a Gaussian kernel.
Ultimate Ideas
The 100 electrical discipline manipulation exams are decentralized, with no express cooperation or communication between AVS, reflecting the present improvement of autonomy, bringing us one step nearer to a smoother, extra energy-efficient freeway. Nonetheless, the probabilities for enchancment are nonetheless large. To fill the fact hole from simulation, it is very important increase the simulation to be quicker and extra correct with higher human driving fashions. Equipping an AVS with further site visitors knowledge may additional enhance the efficiency of the controller, whether or not superior sensors or centralized planning. For instance, Multi-Agent RL is dedicated to bettering its cooperative management technique, but it surely stays an open query that by permitting express communication between AVSs above 5G, it might additional enhance stability and additional alleviate the outage and go waves. Importantly, our controllers combine seamlessly with current adaptive cruise management (ACC) methods to allow large-scale discipline deployments. The extra automobiles with good site visitors mousing controls, the much less waves there shall be on our roads.
Many contributors have participated in making Megavandertest come true! The whole listing is obtainable at Circles Project Web page, challenge particulars.
learn extra: [paper]

{kind=link}