


From mopping up spilled meals to serving meals, robots are being taught to carry out more and more complicated family duties. Many of those homebot trainees be taught by way of imitation. It’s programmed to repeat actions which can be bodily guided by people.
It seems that robots have wonderful imitation talents. However except engineers program the robotic to adapt to any bumps or tremors, the robotic will not essentially know the right way to take care of these conditions aside from beginning the duty from scratch.
Now, MIT engineers are aiming to provide robots a little bit of frequent sense when confronted with conditions that deviate from the trail they had been educated to comply with. They developed a solution to join robotic motion information with the “frequent sense information” of large-scale language fashions (LLMs).
Their method permits the robotic to logically parse many given family duties into subtasks and bodily adapt to disruptions throughout the subtasks, so the robotic does not have to return and begin the duty from scratch, and engineers can proceed with out the necessity for express programming. Right all attainable obstacles alongside the best way.
“Imitation studying is the mainstream method to realizing home robots. Nevertheless, if a robotic is blindly imitating human motion trajectories, small errors will accumulate and finally derail the remainder of the execution. ” says Yanwei Wang, a graduate scholar in MIT’s Division of Electrical Engineering and Laptop Science (EECS). “Utilizing our technique, robots can self-correct execution errors and enhance total job success charges.”
Wang and his colleagues element their new method. study They’ll current their work on the Worldwide Convention on Studying and Representations (ICLR) in Could. Co-authors of the examine embody EECS graduate college students Tsun-Hsuan Wang and Jiayuan Mao, MIT AeroAstro postdoctoral researcher Michael Hagenow, and Julie Shah, HN Slater Professor of Aeronautics and Astronautics at MIT. Consists of Mr.
language duties
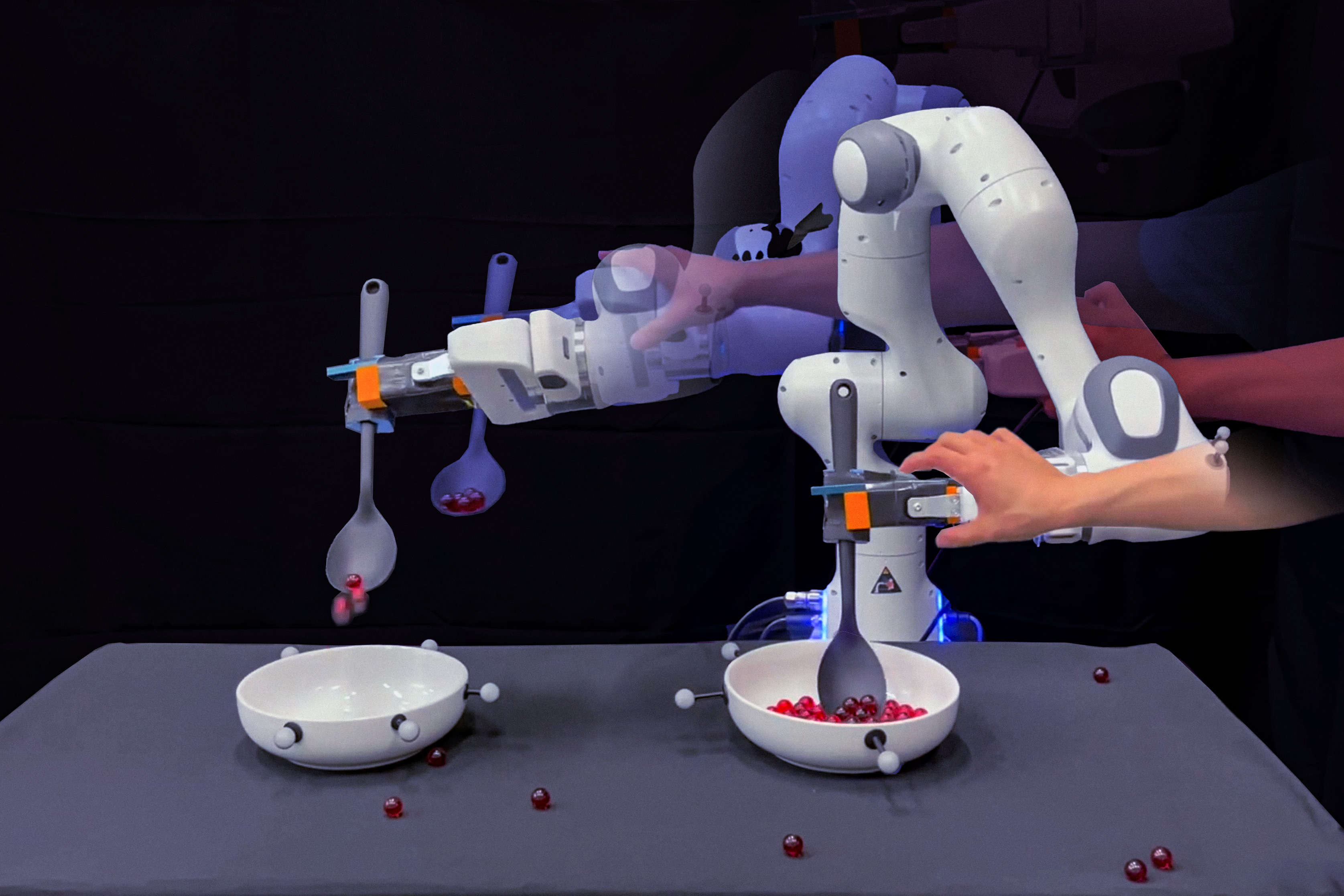
The researchers illustrate their new method with the straightforward job of scooping marbles from one bowl and pouring them into one other bowl. To perform this job, engineers usually transfer the robotic by performing scooping and pouring motions multi functional fluid trajectory. They could do that a number of instances, giving the robotic a number of demonstrations of people to mimic.
“However human demonstrations are one lengthy trajectory,” Wang says.
The staff realized that people could carry out one job at a time, however that job depends upon a sequence of subtasks, or trajectories. For instance, the robotic should first put its hand right into a bowl after which scoop it, scoop a marble, after which transfer it to an empty bowl. Throughout any of those subtasks, if the robotic makes a mistake by being pushed or poked, the engineer will both explicitly label every subtask and program or create a brand new demonstration for the robotic to recuperate from the issue. Except you gather the , your solely recourse is to cease and begin over. It is a failure that permits the robotic to self-correct within the second.
“That degree of planning could be very tedious,” Wang says.
As an alternative, he and his colleagues realized that a few of this work might be carried out robotically by the LLM. These deep studying fashions course of huge libraries of textual content which can be used to determine connections between phrases, sentences, and paragraphs. By means of these connections, LLM can generate new sentences primarily based on what it learns concerning the sorts of phrases which can be prone to comply with the final phrase.
Researchers discovered that along with sentences and paragraphs, LLMs might be directed to create logical lists of subtasks associated to a selected job. For instance, if queried to checklist the actions of scooping marbles from one bowl to a different, LLM would possibly generate a sequence of verbs reminiscent of “attain,” “scoop,” “carry,” and “pour.” there may be.
“LLM has a manner of speaking in pure language the right way to carry out every step of a job. The human’s steady demonstration is the embodiment of these steps in bodily area,” Wang says. “And we needed to attach the 2 in order that the robotic robotically is aware of what stage of the duty it’s in and may replan and recuperate by itself.”
marble mapping
In a brand new method, the staff developed an algorithm that robotically connects LLM’s pure language labels for particular subtasks with pictures that encode the robotic’s place in bodily area, or the robotic’s state. Mapping the robotic’s bodily coordinates, or pictures of the robotic’s state, to pure language labels is called “grounding.” The staff’s new algorithm is designed to be taught a fundamental “classifier.” That’s, it learns to robotically establish what semantic subtask the robotic is in (for instance, “attain” or “scoop”), bearing in mind bodily coordinates and picture views.
“The grounding classifier facilitates the interplay between what the robotic is doing in bodily area and what the LLM is aware of about its subtasks and the constraints it should concentrate on inside every subtask.” Wang explains.
The researchers demonstrated this method in an experiment utilizing a robotic arm educated on a marble-scooping job. The experimenter educated the robotic by bodily guiding it by way of the duty of first reaching into the bowl, scooping up a marble, carrying it over the empty bowl, and pouring it. After some demonstrations, the staff used the pre-trained LLM to query the mannequin. Listing the steps to scoop marbles from one bowl to a different. The researchers then used a brand new algorithm to mix the LLM’s outlined subtasks with the robotic’s movement trajectory information. The algorithm robotically realized the right way to map the bodily coordinates of the robotic in its trajectory and the corresponding picture views to particular subtasks.
The staff then used the newly realized grounding classifier to have the robotic carry out a scooping job independently. Because the robotic progressed by way of the steps of the duty, the experimenter pushed and prodded the robotic out of its path and dropped marbles from the spoon at varied areas. The bot can self-correct, finishing every subtask earlier than shifting on to the subsequent, fairly than stopping and beginning over or persevering with blindly with no marbles within the spoon. I did. (For instance, verify to see if the marbles had been scooped efficiently earlier than transferring them to an empty bowl.)
“With our technique, when a robotic makes a mistake, it does not want a human to program it or moreover show the right way to recuperate from the error,” Wang stated. “That is very fascinating as a result of there may be presently a whole lot of work being carried out in direction of coaching home robots utilizing information collected by teleoperated programs. We will now remodel coaching information into sturdy robotic actions that may carry out complicated duties regardless of exterior perturbations.”

{kind=link}