


An auto manufacturing unit employee can bear in mind the place he left a half-assembled half in a storage bin the night time earlier than and shortly return to that location to retrieve it. However any robots that may work alongside her would have a tough time growing and accessing this identical sort of “spatiotemporal” reminiscence.
Now, MIT researchers have developed a long-term reminiscence framework that enables robots to quickly kind and recall detailed psychological fashions of complicated, large-scale environments.
Sooner or later, this development might enable manufacturing unit staff to easily ask, “decide up the components I began assembling final night time,” and a robotic assistant might be dispatched to choose up the products.
This new methodology combines superior map representations with wealthy descriptions of the surroundings that the robotic collects because it travels over lengthy distances. Robots can shortly entry this reminiscence and reply complicated questions on their surroundings in plain language.
This reminiscence framework solutions questions extra precisely than state-of-the-art strategies and runs quick sufficient for cell robots to make use of it in actual time.
Along with potential purposes in robotics, the strategy may be utilized to augmented actuality techniques to assist upkeep staff detect anomalies and commuters with instructions.
“If we wish robots to have the ability to work alongside and higher work together with people, they should communicate the identical language. Robots want to have the ability to motive about time and area in the identical method people can. That is basically what our methodology is doing. We’re turning conventional maps into language-based maps which are simpler for robots to consider and entry utilizing language,” says lead researcher Luca Carlone, an affiliate professor at MIT’s Aeroastro. Director of the Institute for Info and Choice Techniques (LIDS) and the MIT SPARK Institute.
he’s collaborating in paper By lead creator Nicolas Gorlo, an MIT graduate scholar. Lukas Schmidt, a former analysis scientist on the Massachusetts Institute of Know-how and now a professor on the Nuremberg Institute of Know-how in Germany. This analysis was just lately introduced on the Convention on Laptop Imaginative and prescient and Sample Recognition (CVPR).
spatiotemporal reminiscence
Reminiscence permits synthetic intelligence techniques like chatbots to reply complicated questions and make inferences about earlier interactions with customers.
“We need to design a brand new sort of reminiscence, a spatiotemporal reminiscence, that enables AI-powered robots to recollect real-life interactions and sensor observations. It is just like ChatGPT, but it surely’s rooted in the true world and may reply any query about its surroundings, like ‘The place did I go away my pockets?’,” Carlone says.
To develop such a reminiscence framework, MIT researchers bridged two duties: laptop imaginative and prescient and robotic mapping.
Multimodal laptop imaginative and prescient fashions can perceive and richly describe objects in a scene, however they typically course of just one annotation at a time. Robotic mapping frameworks, then again, create 3D maps of environments comparable to total flats or school campuses, however they usually lack detailed object descriptions or are computationally costly.
A method created by MIT researchers referred to as Describe Something, Wherever, Anytime, at Any Second (DAAAM) takes the perfect of each approaches.
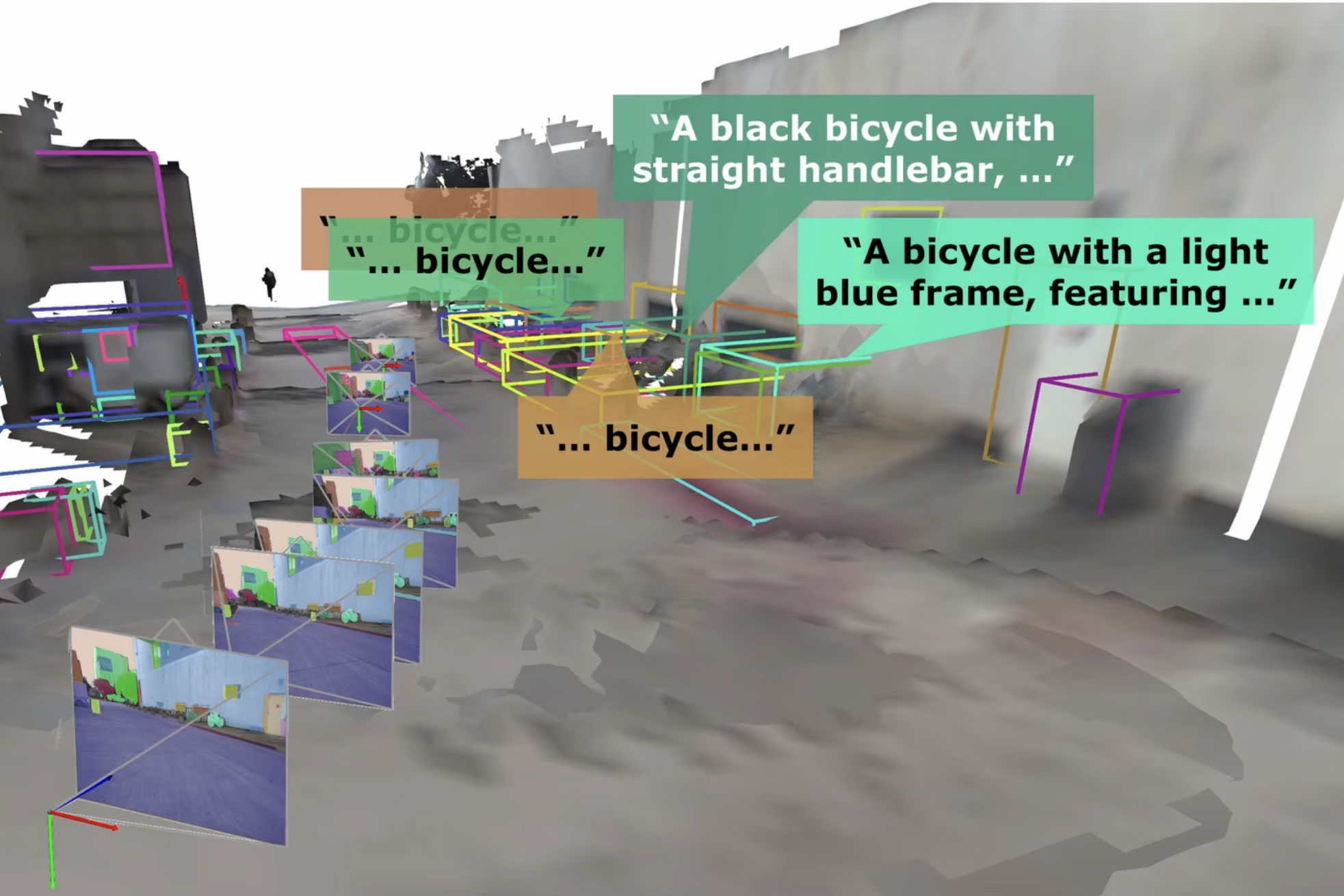
With DAAAM, a robotic attaches wealthy descriptions to the objects it sees because it strikes by way of its surroundings. For instance, a robotic may know {that a} sure constructing on the MIT campus is named the Stata Heart and is designed with a sure sort of structure, or {that a} bike rack holds 5 bikes and the purple bike has a flat tire.
This detailed data is saved in a spatially organized 3D map-based illustration, so objects are grouped into distinct areas. This manner, the robotic can keep in mind that the purple bike with the flat tire is on the bike rack outdoors the Stata Heart.
Nevertheless, present methods to acquire such wealthy descriptions usually take just a few seconds to annotate just a few objects. That is too gradual for real-time efficiency, because the robotic might acknowledge a whole lot of objects throughout a couple of minutes of exploration.
“The sooner a robotic can kind this spatial reminiscence, the extra effectively it will possibly carry out actions inside its surroundings,” Carlone added.
Streamline processes
To hurry up processing, DAAAM aggregates close by objects whereas transferring and makes use of optimization methods to pick key frames for annotation. These are the photographs that present the clearest view of a number of objects, permitting the system to totally describe a number of gadgets in parallel, dashing up computations by an element of 10.
Because the robotic explores the area, every batch of annotations is hooked up to a number of objects at particular areas on the 3D map.
“As a result of we annotate each object solely as soon as, our framework can run in actual time in very giant environments, and by clustering objects into areas, we will reply a variety of queries about objects and areas within the surroundings,” Gorlo explains.
As soon as the system has constructed this spatial reminiscence, it should retrieve data from the large database of objects and descriptions in an environment friendly method.
To make this attainable, the researchers used LLM, which invokes quite a lot of instruments that may shortly retrieve particular data in a method that reduces hallucinations. This permits DAAAM to precisely reply person queries in just some seconds.
For instance, if you happen to ask the robotic a couple of specific sculpture it noticed close to a constructing on the MIT campus, DAAAM can use a semantic search instrument to retrieve data based mostly on the phrase “sculpture,” and one other instrument to retrieve data based mostly on the constructing’s location.
When examined and in comparison with different strategies, DAAAM was 21 to 53 % extra correct, relying on the kind of query.
Sooner or later, the researchers hope to increase DAAAM in order that the system can seize essential occasions that happen within the surroundings. They’re additionally engaged on constructing a stage of belief into the system’s response.
“In the end, we need to have robots that may assist with all types of duties, and with this framework we’re constructing the inspiration that may allow generalist brokers that may do something you ask them to do,” Gorlo says.
This analysis was funded partly by the U.S. Military Analysis Laboratory and the Workplace of Naval Analysis. Carlone is at the moment on go away as an Amazon Scholar. This text describes work executed at MIT and isn’t affiliated with Amazon.

{kind=link}