


Genesis AI launch Genesis World 1.0. The platform consists of 4 parts: the Genesis World physics engine, Nyx (a real-time path hint renderer), Quadrants (a Python-to-GPU compiler), and a simulation interface. Designed to speed up the event of robot-based fashions by simulation-based analysis.
There are two bottlenecks in growing robotics fashions: information and iteration velocity. This area focuses on information. Genesis AI argues {that a} slower, less-discussed bottleneck is the mannequin improvement cycle itself, particularly how shortly groups can consider candidate insurance policies and evaluate mannequin checkpoints.
What drawback does this resolve?
A typical coverage analysis in Genesis spans tons of of duties, every containing tons of of episodes. To carry out this in the actual world, one analysis cross requires greater than 200 hours of steady robotic operation by one operator and one robotic station. A statistically significant comparability between checkpoints requires many such passes.
Genesis World 1.0 performs the identical analysis in lower than 0.5 hours. No people or {hardware} are concerned within the loop, and bit-accurate outcomes are constant from run to run. That is roughly two orders of magnitude quicker than the precise analysis.
The analysis staff deliberately selected to prioritize analysis earlier than utilizing simulation to generate coaching information. Their reasoning is that if coaching and analysis share the identical simulated distribution, improved efficiency might replicate a tighter match to the simulator’s dynamics moderately than a very higher mannequin. Conserving the 2 pipelines separate produces a cleaner sign.
The analysis staff describes this analysis strategy as follows: Zero Shot Actual vs. Sim: Insurance policies evaluated in simulation are educated solely on real-world information. Pre-training doesn’t embody simulated information.
Sim-to-Actual correlation outcomes
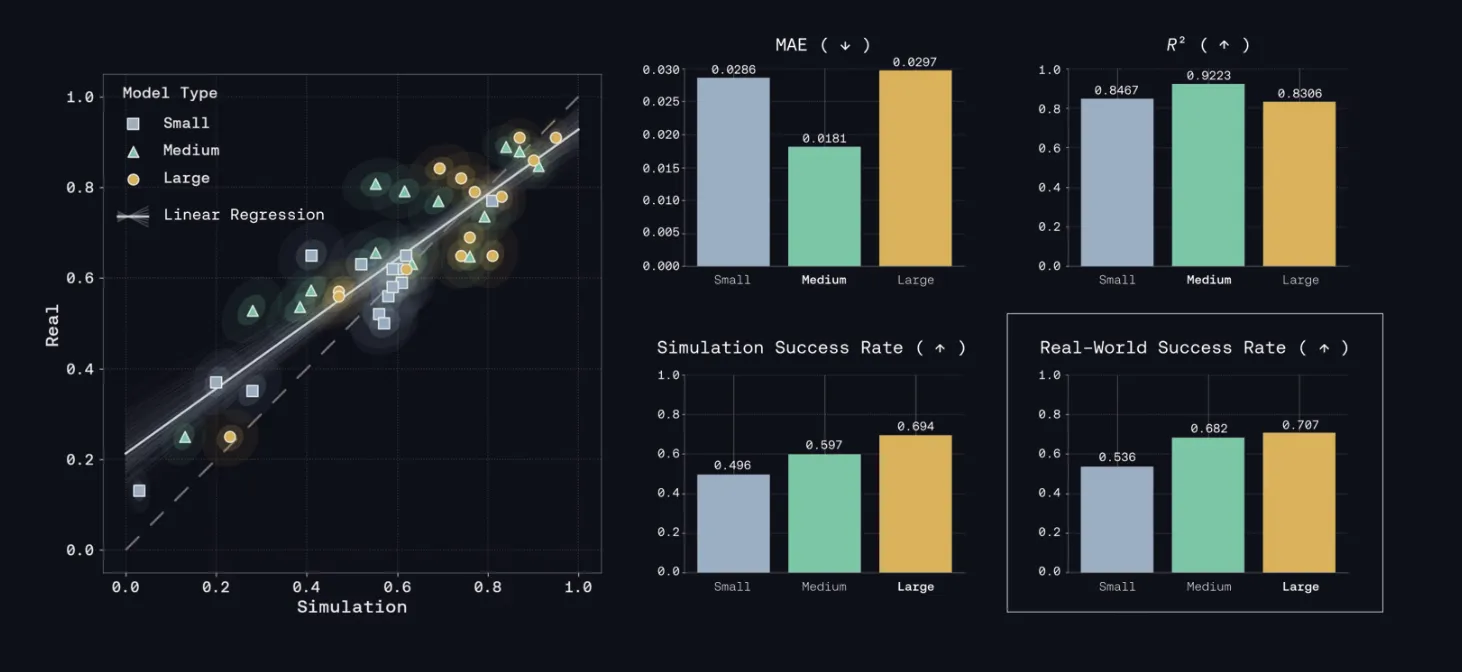
The Genesis analysis staff stories the next Pearson correlation: 0.8996 (95% CI: [0.7439, 0.9314]) throughout simulation and on-hardware rollout. The analysis lined three mannequin variants (small, medium, and enormous) throughout 14 duties, with 200 episodes per activity. The analysis staff carried out 1,000,000 bootstrap iterations to estimate confidence intervals.
The metric proposed by SimplerEnv, Imply Most Rank Violation (MMRV), is 0.0166 (95% CI: [0.0102, 0.0474]). A low MMRV signifies that the simulator maintains a relative efficiency rating of various fashions.
To diagnose the place the variations between simulation and actuality are coming from, the Genesis staff constructed a real-time side-by-side rig. Run the simulator and bodily robotic in parallel from the identical initialization. Observations (digital camera frames and proprioception) are obtained from a simulator, a robotic, or a mix of each. Establish whether or not the supply of divergence is bodily, rendering, communication, or management by changing one supply at a time.
After this work, the hole between their actuality shall be 45% smallerthan the subsequent finest different simulator, as measured by the FID rating of the dataset.
4 parts of Genesis World 1.0
Nyx — Actual-time path hint rendering
Nyx is a GPU-accelerated path tracer that connects to Genesis World as a digital camera sensor. is obtainable as gs-nyx-plugin Python bundle. Pre-built wheels can be found for x86-64 Linux (manylinux 2.34+) and Home windows 10/11 and require an NVIDIA GPU with CUDA.
Nyx targets noise-free 1080p frames 4ms or much less Works on high-end shopper GPUs with out baking or ghosting. To realize this aim, we use visibility buffers, a bindless GPU-driven structure, MSAA, {hardware} ray tracing, {hardware} matrix cores, and video compression.
Path tracing is the baseline. Multi-bounce lighting, gentle shadows, and oblique lighting are structurally correct. Above it’s a bodily grounded digital camera mannequin. The HDRI pipeline illuminates the scene with measured radiance. Belongings are obtained from inside scans and photogrammetry. 3D Gaussian splats prolong protection when mesh reconstruction is inadequate.
Nyx is pushed by batched physics moderately than scene-by-scene execution. This enables 1000’s of parallel rollouts, every with its personal state of affairs, lighting, and digital camera trajectory, to undergo a single unified rendering pipeline.
Genesis World Physics — unified multiphysics engine
The Genesis World physics platform is open supply (Apache 2.0) and runs multiphysics in a single pipeline. Articulated Inflexible Our bodies (MJCF/URDF/USD), FEM for elastically deformable and materials, MPM for granular and elastoplastic supplies, SPH for fluids, and PBD for high-velocity materials and position-based fluids.
Three interchangeable couplers can be found behind the identical scene API. Drake-style semi-analytical primal coupler with hydroelastic contacts. Incremental potential contact (IPC) couplers for cross-free contact in deformable scenes. Switching between couplers requires a single line of code change and doesn’t change belongings, sensors, or coverage interfaces.
Genesis World 1.0 launched two new solvers. of exterior joint restraints (constructed on libuipc) embeds joint house dynamics instantly into the IPC optimization, so joint house forces and make contact with forces are solved concurrently moderately than being staggered between separate solvers. The second is Barrier-free elastic mechanicsexchange the logarithmic barrier in IPC with a customized augmented Lagrangian. The usual IPC barrier worsens the Hessian situation with shut contact. The prolonged Lagrangian formulation avoids this and permits all contact pairs returned by steady collision detection to be instantly put into the lively set. The analysis staff stories: 103x quicker It performs higher than conventional IPC in high-touch scenes and maintains the no-intersection assure.
Extra enhancements: new sensors (level cloud haptic, temperature grid, proximity), implicit FEM with Newton + CG solver, and expanded asset help (URDF xacro, MuJoCo common actuators, composite/mimetic joints, equal/weld constraints).
Quadrant — Python to GPU compiler
Quadrants is a cross-platform compiler for GPU-accelerated physics simulations developed by Genesis AI and launched with Apache 2.0. Kernels are written in plain Python and JIT-compiled by way of LLVM to NVIDIA CUDA, AMD ROCm, Apple Metallic, Vulkan, and x86/ARM64 CPUs. Branched out from Taichi in June 2025. The title refers back to the Chinese language philosophical maxim that Taichi produces 4 types (quadrant).
Key efficiency enhancements in comparison with upstream Taichi: Max. 4.6 occasions Improved execution time on Genesis Manipulation and Motion benchmarks. Heat cache startup time single_franka_envs.py Lowered from 7.2 seconds to 0.3 seconds. 10× Velocity up. Reverse mode autodiff has first-class performance in all backends, making differentiable simulations transportable.
Bodily steps are recorded as a single kernel graph, eradicating per-step startup delays. Impartial kernels are executed in parallel by way of streams. Dense linear algebra (Cholesky decomposition, trigonometric fixing) is compiled into 16×16 tile-blocked code paths. The perf-dispatch layer benchmarks kernel variants on the primary name and caches the quickest alternate options for every signature. Tensor shares gadget reminiscence with PyTorch by way of DLPack with zero-copy interoperability.
set up:
simulation interface
The fourth part is the simulation interface. A software that connects physics engines, renderers, and compilers to programs that can be utilized for downstream robotics purposes. This consists of photogrammetry pipelines for creating digital twins, automated pipelines for programmatic atmosphere technology (scene structure, asset choice, activity specs, success metrics), and cross-embodiment environments throughout a number of robotic configurations.
Analysis framework
The analysis of generative constructions is carried out as a classification of orthogonal perturbation axes over roughly 10 dimensions, in response to the framework of “.A taxonomy for evaluating generalist robot operation policies“:
- visible: Lighting situations, digital camera perturbations, background variations
- Motion: By no means-before-seen object combos, placement variations, and robotic configurations
- semantic: Language paraphrasing, subtask ordering, digital camera perspective
For every axis, one parameter is diversified whereas all different parameters stay at their nominal values. The analysis staff defines robustness in a selected axis because the relative efficiency maintained beneath perturbations in comparison with a nominal unperturbed setting. Perturbation sweeps throughout coaching checkpoints at a number of mannequin scales require 1000’s of analysis episodes for every information level. This scale is just achievable if the simulation analysis is carried out with out {hardware}.
Necessary factors
- Genesis World 1.0 has 4 parts: Nyx (renderer), Genesis World (physics), Quadrants (compiler), and the simulation interface.
- In a simulation analysis, we achieved a Pearson correlation of 0.8996 for an on-hardware rollout spanning 14 duties and 200 episodes every.
- Insurance policies are educated solely on real-world information. Pre-training (zero-shot actual to simulation) doesn’t embody simulated information.
- Barrier-free elastic mechanics offers as much as 103x speedup in comparison with conventional IPC in high-contact scenes.
- Quadrant delivers as much as 4.6x quicker execution occasions in comparison with upstream Taichi, decreasing heat cache startup time from 7.2 seconds to 0.3 seconds.
GitHub repository:
Please be at liberty to observe us too Twitter Do not forget to affix us 150,000+ ML subreddits and subscribe our newsletter. grasp on! Are you on telegram? You can now also participate by telegram.
Have to associate with us to advertise your GitHub repository, Hug Face Web page, product launch, webinar, and so on.? connect with us

Michal Sutter is a knowledge science skilled with a grasp’s diploma in information science from the College of Padova. With a robust basis in statistical evaluation, machine studying, and information engineering, Michal excels at reworking complicated datasets into actionable insights.

{kind=link}