


An impediment avoidance car is a sort of autonomous robotic that may detect and keep away from obstacles in its path with out human management. It makes use of sensors (reminiscent of ultrasound or infrared) to sense its environment and makes choices with the assistance of a microcontroller (reminiscent of Arduino or Raspberry Pi).
Working precept sensing:
●Detects obstacles in entrance utilizing ultrasonic or infrared sensors.
●The sensor repeatedly sends alerts and measures the gap to the thing. choice making
● A microcontroller (Arduino UNO, Nano, and so on.) receives sensor information.
● If the gap is lower than a threshold (e.g. 20 cm), the automotive decides to cease and alter route. motion
● The automotive is managed by a DC motor (by way of L298N motor driver).
● Based mostly on the sensor readings, the Arduino instructions the automotive to maneuver ahead, backward, left, and proper.
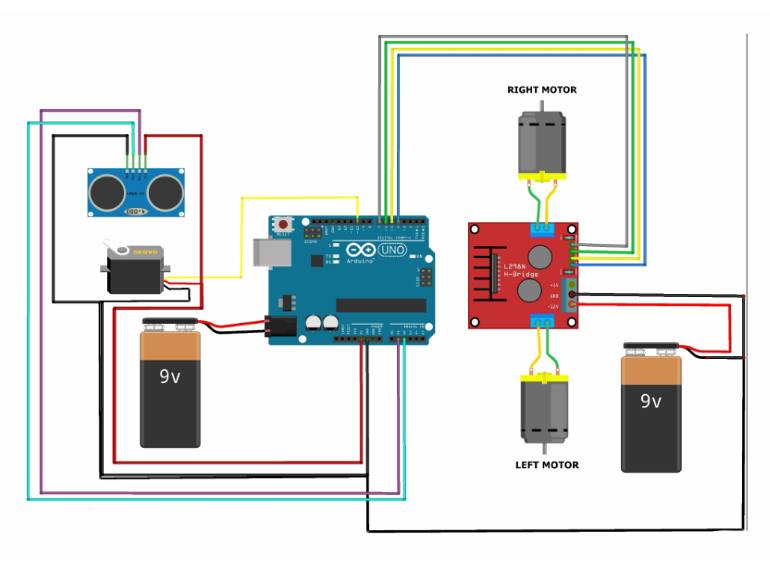
Required parts:
1.Arduino UNO
2. Ultrasonic sensor – HC-SR04 (normal goal)
3.SG90 micro servo motor
4. L298N Twin H Bridge Motor Driver
5.DC motor
6. 2WD 3-stage robotic chassis package (fabricated from aluminum)
7. 9V battery
8. 9V battery connector
9. Jumper wire (normal goal)
Connectivity:
software:
● Autonomous robots and autos
● Sensible automobiles and drones for navigation
●Warehouse robotic for transporting merchandise
● Academic undertaking to study robotics and automation
Working state of affairs:
● By default the automotive strikes ahead.
●When the ultrasonic sensor detects an impediment inside 15cm,
● The automotive will cease.
● Flip left or proper relying on the accessible street.
● Maintain transferring ahead
code:
// L298N management pin
const int LeftMotorForward = 4;
const int LeftMotorBackward = 5;
const int RightMotorForward = 6;
const int RightMotorBackward = 7;
#outline TRIGGER_PIN A1 // Arduino pin is related to the set off pin of the ultrasonic sensor.
#outline ECHO_PIN A2 // Arduino pin is related to the echo pin of the ultrasonic sensor.
#outline MAX_DISTANCE 250 // Most distance to ping (in centimeters).
The utmost sensor distance is 250cm.
Servo servo_motor; // Servo identify
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup for pin and max distance.
boolean advance = false;
int distance = 100;
void setup()
{
// Configure L298N management pin as output
pinMode(RightMotorForward, OUTPUT);
pinMode(LeftMotorForward, OUTPUT);
pinMode(LeftMotorBackward, OUTPUT);
pinMode(RightMotorBackward, OUTPUT);
Servomotor.connect(10); // Join the servo on pin 9 to the servo object.
Servomotor.Mild(115); // Set to 115 levels.
delay(2000); // wait 2 seconds.
Distance = readPing(); // Get the ping distance.
delay(100); // Wait 100ms.
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
}
void loop()
{
int distanceRight = 0;
int distance left = 0;
delay(50);
if (distance <= 20)
{
moveStop();
delay(300);
moveBackward();
delay(400);
moveStop();
delay(300);
distanceRight = lookRight();
delay(300);
distanceLeft = lookLeft();
delay(300);
if (proper distance >= left distance)
{
Flip proper();
delay(300);
moveStop();
}
Apart from that
{
Flip left();
delay(300);
moveStop();
}
}
Apart from that
{
moveForward();
}
distance = readPing();
}
int lookRight() // Servomotor Look Proper perform
{
servomotor.write(50);
delay(500);
int distance = readPing();
delay(100);
Servomotor.Mild(115);
return distance.
}
int lookLeft() // Servomotor leftward perform
{
Servomotor.Mild(180);
delay(500);
int distance = readPing();
delay(100);
Servomotor.Mild(115);
return distance.
}
int readPing() // Learn the Ping perform of the ultrasonic sensor.
{
delay(100); // Wait 100ms between pings (roughly 20 pings/sec). 29ms ought to be the shortest delay between pings.
int cm = sonar.ping_cm(); // Ship a ping and get the ping distance in centimeters (cm).
if (cm == 0)
{
cm = 250;
}
Returns cm.
}
void moveStop() //Motor driver motion cease perform.
{
digitalWrite(RightMotorForward, LOW);
digitalWrite(RightMotorBackward, LOW);
digitalWrite(LeftMotorForward, LOW);
digitalWrite(LeftMotorBackward, LOW);
}
void moveForward() //Motor driver advance perform.
{
digitalWrite(RightMotorForward, HIGH);
digitalWrite(RightMotorBackward, LOW);
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
}
void moveBackward() // Motor driver retraction perform.
{
digitalWrite(RightMotorForward, LOW);
digitalWrite(RightMotorBackward, HIGH);
digitalWrite(LeftMotorForward, LOW);
digitalWrite(LeftMotorBackward, HIGH);
}
voidturnRight() // Motor driver proper rotation perform.
{
digitalWrite(RightMotorForward, LOW);
digitalWrite(RightMotorBackward, HIGH);
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
}
voidturnLeft() // Motor driver left rotation perform.
{
digitalWrite(RightMotorForward, HIGH);
digitalWrite(RightMotorBackward, LOW);
digitalWrite(LeftMotorForward, LOW);
digitalWrite(LeftMotorBackward, HIGH);
}

{kind=link}