


For instance, say you wish to practice a robotic to know learn how to use instruments in order that it could actually shortly learn to use a hammer, wrench, and screwdriver to sort things round the home, you want an enormous quantity of information that exhibits learn how to use the instruments.
Current robotics datasets fluctuate broadly in modality: some embody coloration pictures, others include tactile traces, and information could also be collected in quite a lot of domains, reminiscent of simulations or human demonstrations, and every dataset could seize distinctive duties and environments.
As a result of it’s tough to effectively incorporate information from so many sources right into a single machine studying mannequin, many strategies practice robots utilizing just one sort of information, however robots educated on this method with a comparatively small quantity of task-specific information are sometimes unable to carry out new duties in unfamiliar environments.
As a part of an effort to coach higher multipurpose robots, MIT researchers have developed a method for combining a number of sources of information throughout domains, modalities, and duties utilizing a kind of generative AI referred to as a diffusion mannequin.
They practice a separate diffusion mannequin to study a method, or coverage, for finishing one job utilizing a particular dataset, after which mix the coverage realized by the diffusion mannequin right into a common coverage that enables the robotic to carry out a number of duties in quite a lot of settings.
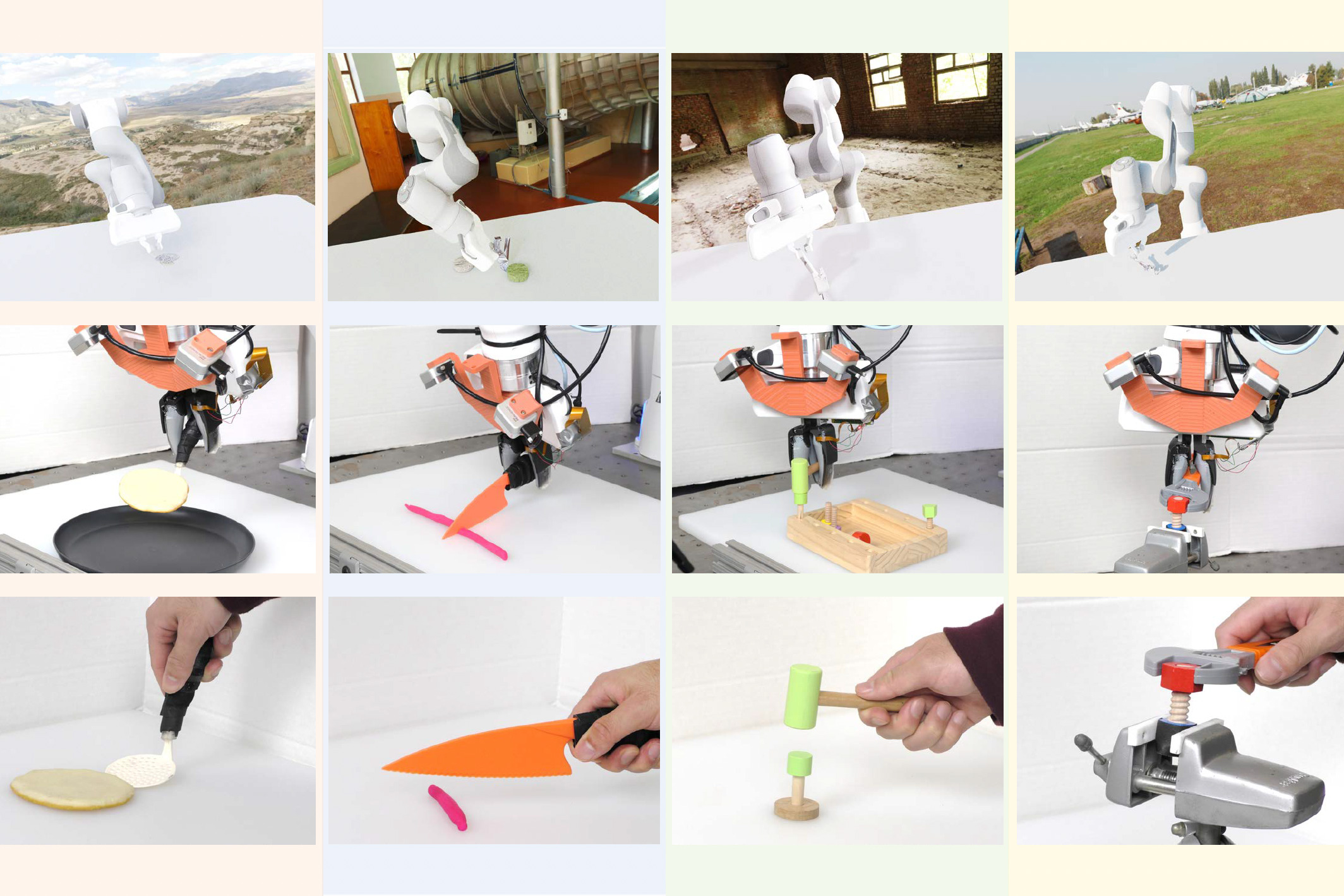
In simulations and real-world experiments, this coaching method enabled the robotic to carry out a number of tool-use duties and adapt to new duties it had not seen throughout coaching. The strategy, referred to as coverage composition (PoCo), improved job efficiency by 20 p.c in comparison with baseline methods.
“Coping with heterogeneity in robotics datasets is a little bit of a chicken-and-egg drawback: if we wish to practice a common robotics coverage with quite a lot of information, we first must get all of this information with deployable robots. I feel leveraging all the accessible heterogeneous information, as researchers have accomplished with ChatGPT, is a vital step for the sector of robotics,” stated Robert G. PoCo Papers.
Wang’s co-authors embody Jialian Zhao, graduate scholar in mechanical engineering; Yilun Du, graduate scholar in EECS; Edward Adelson, the John and Dorothy Wilson Professor of Imaginative and prescient Science within the Division of Mind and Cognitive Sciences and a member of the Laptop Science and Synthetic Intelligence Laboratory (CSAIL); and senior writer Russ Tedlake, Toyota Professor of EECS, Aerospace Engineering and Mechanical Engineering and a member of CSAIL. The analysis shall be offered on the Robotics: Science and Methods convention.
Combining completely different information units
A robotic coverage is a machine studying mannequin that takes an enter and makes use of it to carry out an motion. A method to consider a coverage is as a method. For a robotic arm, that technique may be a trajectory, or a collection of poses that transfer the arm to choose up a hammer and use it to drive in a nail.
The datasets used to coach robotic insurance policies are usually small and targeted on a particular job and atmosphere, reminiscent of packing objects into containers in a warehouse.
“Each robotic warehouse generates terabytes of information, however that information belongs solely to the particular robotic gear that is dealing with that load. Utilizing all of that information to coach a general-purpose machine is not very best,” Wang says.
The MIT researchers have developed a method that may take a collection of small datasets, reminiscent of these collected from a big robotic warehouse, study a separate coverage from every dataset, after which mix the insurance policies in a method that enables the robotic to generalize to many duties.
Every coverage is expressed utilizing a kind of generative AI mannequin referred to as a diffusion mannequin. Usually used for picture era, diffusion fashions study to create new information samples which can be just like samples in a coaching dataset by iteratively refining their output.
However as an alternative of educating the diffusion mannequin to generate pictures, the researchers train it to generate trajectories for a robotic. They do that by including noise to the trajectories in a coaching dataset. The diffusion mannequin steadily removes the noise and refines the output right into a trajectory.
This know-how: Promotion policywas beforehand launched by researchers at MIT, Columbia College, and Toyota Analysis Institute. PoCo builds on this proliferation coverage analysis.
The analysis crew trains every diffusion mannequin utilizing a distinct sort of dataset, together with video demonstrations of people and information collected from remotely controlling a robotic arm.
The researchers then carry out a weighted mixture of the person insurance policies realized by all of the dissemination fashions and iteratively refine the output in order that the mixed coverage meets the goals of every particular person coverage.
Higher than the sum of its components
“One benefit of this method is that we will mix insurance policies to get the perfect of each worlds. For instance, a coverage educated on real-world information could possibly obtain higher dexterity, whereas a coverage educated in simulation could possibly obtain higher generalization,” Wang says.
Picture: Supplied by researchers
As a result of the insurance policies are educated independently, diffusion insurance policies might be mixed to realize higher outcomes on a given job. Customers may add information to a brand new modality or area by coaching extra diffusion insurance policies with that dataset, quite than beginning the whole course of from scratch.
Picture: Supplied by researchers
The researchers examined PoCo on simulated and actual robotic arms to carry out quite a lot of software duties, reminiscent of driving a nail with a hammer and flicking an object with a spatula, and located that PoCo improved job efficiency by 20 p.c in comparison with baseline methods.
“To our shock, as soon as we completed tuning and visualized it, we might clearly see that the composite trajectory was significantly better than both one alone,” Wang says.
Sooner or later, the researchers hope to use the approach to longer duties, reminiscent of having a robotic choose up and use a software, then change to a different software, and in addition to include bigger robotics datasets to enhance efficiency.
“Profitable robotics requires all three kinds of information: web information, simulation information and actual robotic information. Find out how to mix them successfully is the million-dollar query. PoCo is a particular step in the proper course,” stated Jim Fan, a senior analysis scientist and AI brokers initiative chief at NVIDIA, who was not concerned within the analysis.
The analysis was funded partially by Amazon, the Protection Science and Know-how Company of Singapore, the U.S. Nationwide Science Basis and the Toyota Analysis Institute.

{kind=link}